Знакомство с симулятором lab.open-roberta.org. Блоки движения.
Открой ссылку https://lab.open-roberta.org .
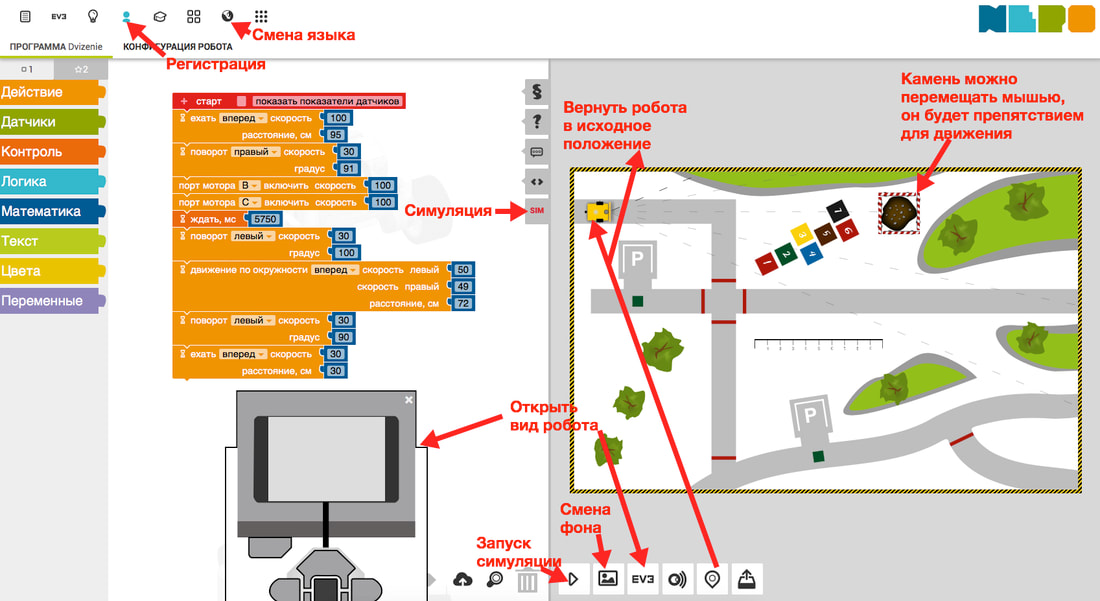
Выбери EV3.
Нажми на глобус, выбери русский язык.
Открой по очереди все блоки.
Подумай, в чем состоит разница между блоками "Движение" и "Ехать".
Посмотри мою программу и повтори ее.
Для записку симуляции с правой стороны нажми кнопку "SIM".
Для того чтобы поменять поле-фон нажми внизу на кнопку "Изменить фон".
Для запуска симуляции нажми в нижней части кнопку "Запустить программу в симуляции".
Создай свою программу так, что робот повторил мою траекторию движения.
Загрузи ссылку со своей программой или ее фото по ссылке: https://padlet.com/gelja05/z0i56c3u5rig .
Ниже ты найдешь видео, с помощью которых научишься управлять роботом.
Выбери EV3.
Нажми на глобус, выбери русский язык.
Открой по очереди все блоки.
Подумай, в чем состоит разница между блоками "Движение" и "Ехать".
Посмотри мою программу и повтори ее.
Для записку симуляции с правой стороны нажми кнопку "SIM".
Для того чтобы поменять поле-фон нажми внизу на кнопку "Изменить фон".
Для запуска симуляции нажми в нижней части кнопку "Запустить программу в симуляции".
Создай свою программу так, что робот повторил мою траекторию движения.
Загрузи ссылку со своей программой или ее фото по ссылке: https://padlet.com/gelja05/z0i56c3u5rig .
Ниже ты найдешь видео, с помощью которых научишься управлять роботом.
1-ое Задание. Введение в lab.open-roberta.org
2-ое Задание. Движение в https://lab.open-roberta.org/
3-е Задание. Использование Ультразвукового датчика
"Ультразвуковой датчик — это цифровой датчик, который определяет расстояние до находящегося перед ним объекта .
Он делает это, посылая звуковые волны высокой частоты и измеряя время, за которое звук отразится назад к датчику . Частота звука слишком высока, чтобы его можно было услышать .
Если в качестве единицы измерения используются сантиметры, расстояние обнаружения составляет от 3 до 250 см (с точностью +/- 1 сантиметр) ."
https://education.lego.com/ru-ru/support/mindstorms-ev3/user-guides стр.15
Он делает это, посылая звуковые волны высокой частоты и измеряя время, за которое звук отразится назад к датчику . Частота звука слишком высока, чтобы его можно было услышать .
Если в качестве единицы измерения используются сантиметры, расстояние обнаружения составляет от 3 до 250 см (с точностью +/- 1 сантиметр) ."
https://education.lego.com/ru-ru/support/mindstorms-ev3/user-guides стр.15
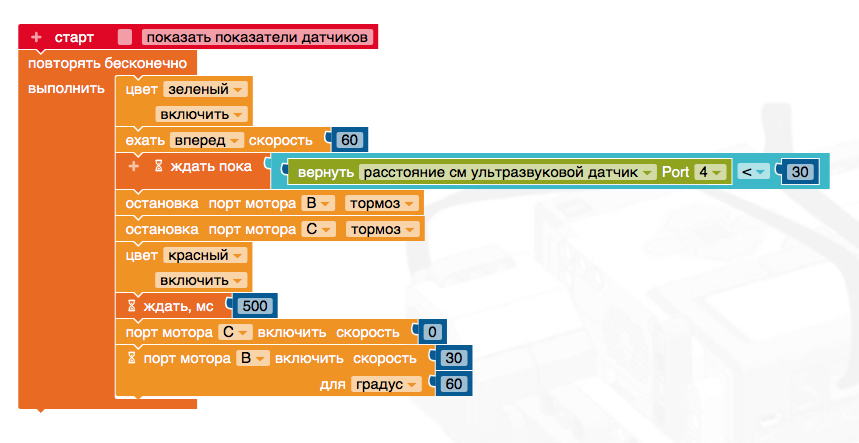
Наш вариант программы: начало бесконечного цикла включается зеленая подсветка кнопок, робот едет вперед до тех пор, пока расстояние не будет меньше 30 см. Тогда останавливается, включается красная подсветка кнопок на 0,5 секунды, робот поворачивает влево. Повторение цикла.
